

NVIDIA在GTC 22春季展发表DRIVE Map技术,以混合模式测量与绘制地图,并预计在2024年完成勘测500,000公里道路,为Level 3、4自驾车带来更完善的地图资料。
多重传感器提升准确度与安全性
NVIDIA创办人兼首席执行官黄仁勋在GTC 22春季展开幕演说发表DRIVE Map地图测绘平台,是款能在大幅自动化的前提下提升安全性的多重模块(Multimodal)技术,它结合DeepMap高精确度的地图信息,以及以AI为基础的群众绘制(Crowdsourced Mapping)所带来的大量与即时信息。
NVIDIA也宣布NVIDIA DRIVE Orin自动驾驶车电脑进入投产阶段,并有超过25家汽车制造商采用DRIVE Orin SoC搭配DRIVE Hyperion平台开发软件定义车辆。 最新一代Hyperion 9平台将提高处理传感器数据的效能,进一步提高安全性,并扩大全自动驾驶的操作领域,其传感器套件包含14组摄影机、9组雷达、3组激光雷达及20组超声波设备。
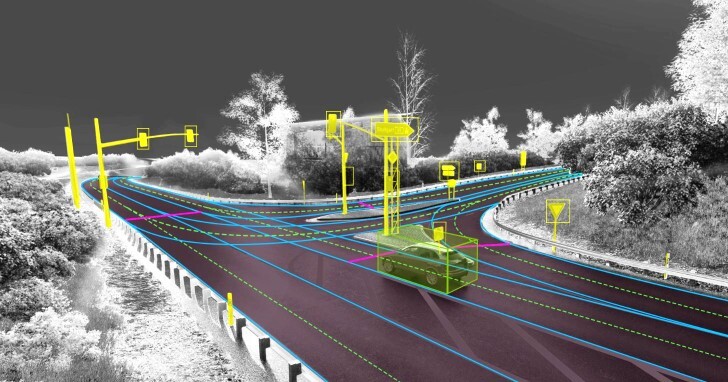
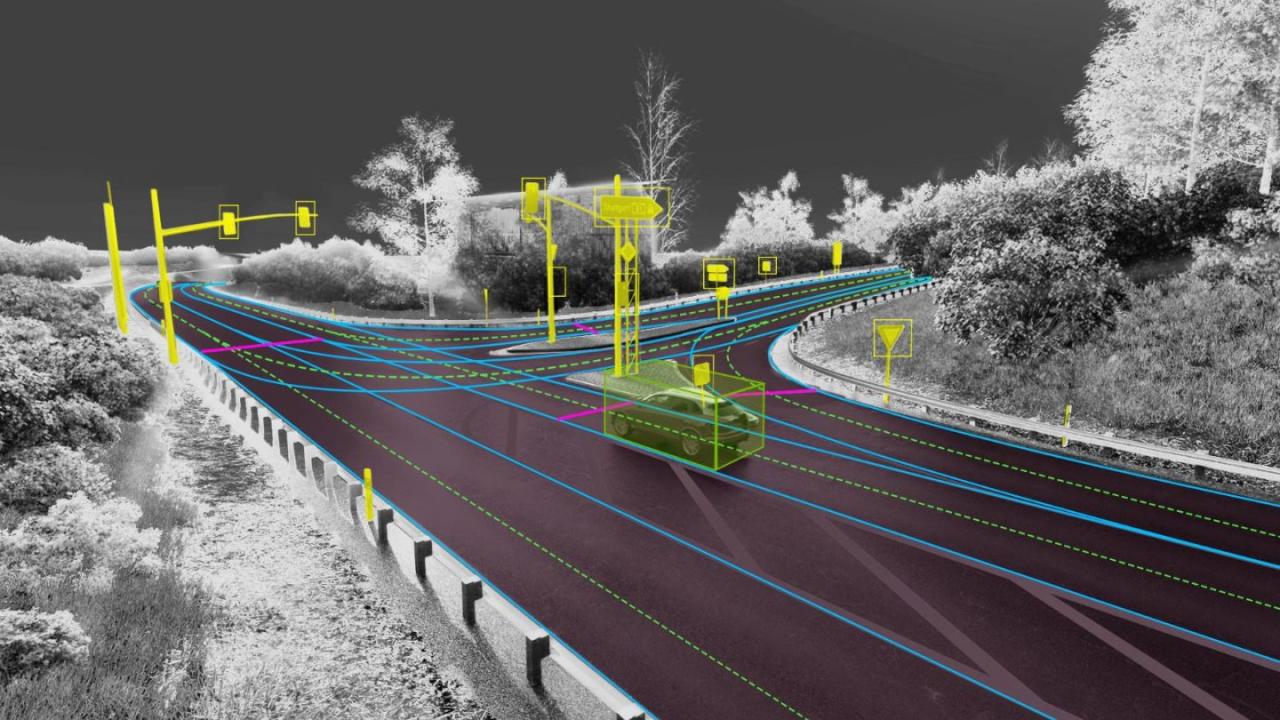
DRIVE Map的定位功能由摄影机、雷达、激光雷达等3种不同装置达成,并经由AI程序整合信息以提供多样的功能性,其中摄影机可以辨识车道分隔线、道路标记、道路边界、交通信号与灯号、电线杆等物件,而雷达除了可以判断这些物件,还能在恶劣的照明或天候条件下弥补摄影机或激光雷达的不足,并且能够在郊区缺乏典型地图信息时, 透过分析雷达回波来辨识景物。 光达定位则有最高的精确度,其分辨率高达5公分,提供最精确、最可靠的环境辨识。
另一方面,使用3种设备的好处是安全冗余,当其中某种装置失效时,系统可以采用其他设备提供的信息进行判断,以提高整体系统的安全性。
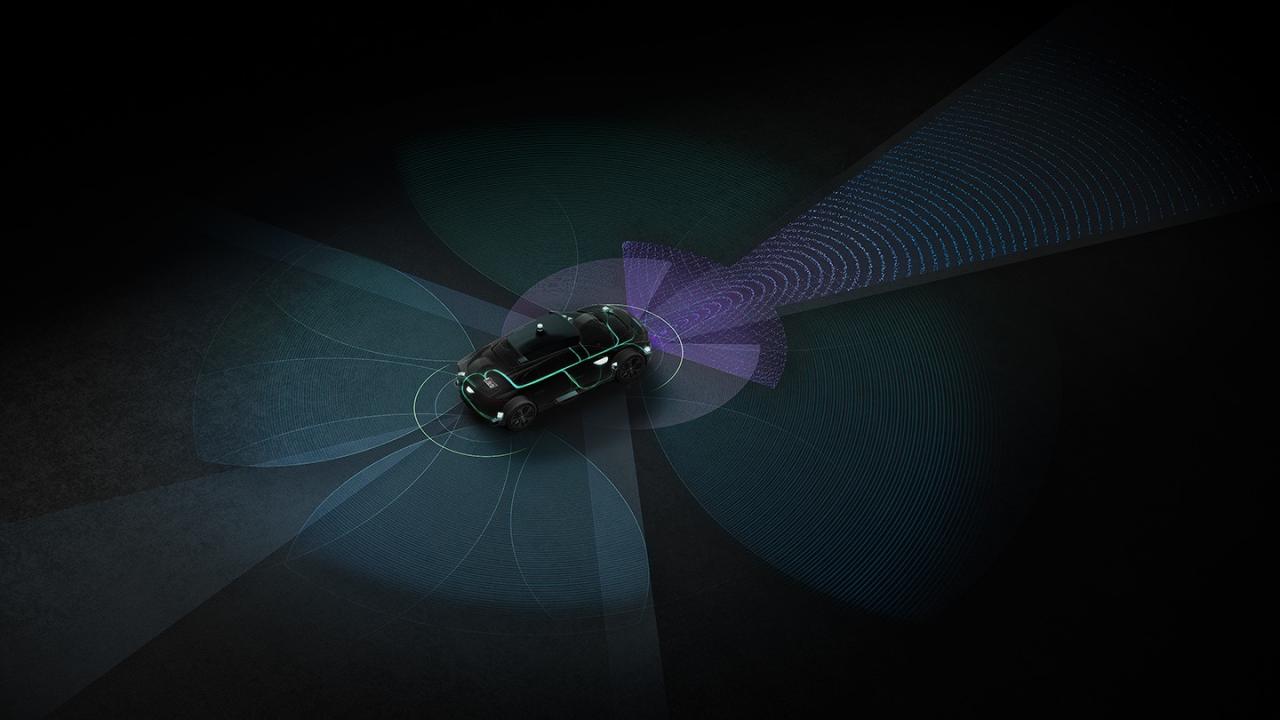 ▲ 最新一代Hyperion 9平台的传感器套件包含14组摄影机、9组雷达、3组激光雷达及20组超声波设备,提供高度精确且冗余的感测功能。
▲ 最新一代Hyperion 9平台的传感器套件包含14组摄影机、9组雷达、3组激光雷达及20组超声波设备,提供高度精确且冗余的感测功能。
 ▲ DRIVE Orin SoC具有254TOPS运算效能,远高于目前DRIVE Xavier的30TOPS。
▲ DRIVE Orin SoC具有254TOPS运算效能,远高于目前DRIVE Xavier的30TOPS。
 ▲ 这些感应器不但可以用来辨识道路上的景色与物品,也能用来测绘地图。
▲ 这些感应器不但可以用来辨识道路上的景色与物品,也能用来测绘地图。
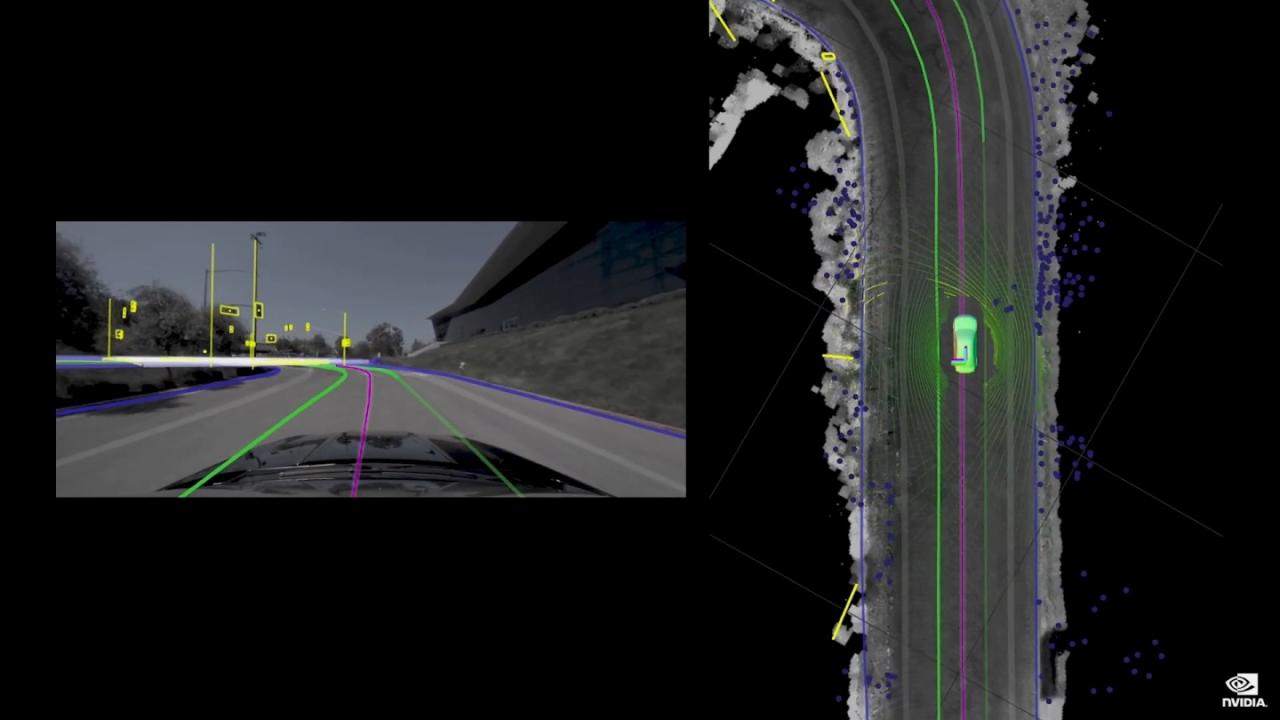
 ▲ 系统能够整合所有信息,以判断路上发生的状况,提高自驾车的安全性。
▲ 系统能够整合所有信息,以判断路上发生的状况,提高自驾车的安全性。
大地图时代来临
DRIVE Map的数据来自地面实况调查地图引擎(Ground Truth Survey Map Engine)和群众地图引擎(Crowdsourced Nap Engine)等2种不同来源,前者由专门的街景车进行街道地图测绘,后者则由数以百万计的车辆上传实时信息,达到在公分级精确的地图上不断更新和扩展信息。
DRIVE Map除了可以协助行驶中的车辆,还能将数据导入Omniverse平台制作1:1的数字孪生地球模型,并搭配英伟达 DRIVE Sim自驾车模拟训练系统,加速自驾车的开发流程。
 ▲ DRIVE Map的数据除了来自专门的街景车,也由数以百万计的车辆提供实时信息。
▲ DRIVE Map的数据除了来自专门的街景车,也由数以百万计的车辆提供实时信息。
 ▲ 后端系统可以整合这些资料,提供既精准又实时更新的地图。
▲ 后端系统可以整合这些资料,提供既精准又实时更新的地图。
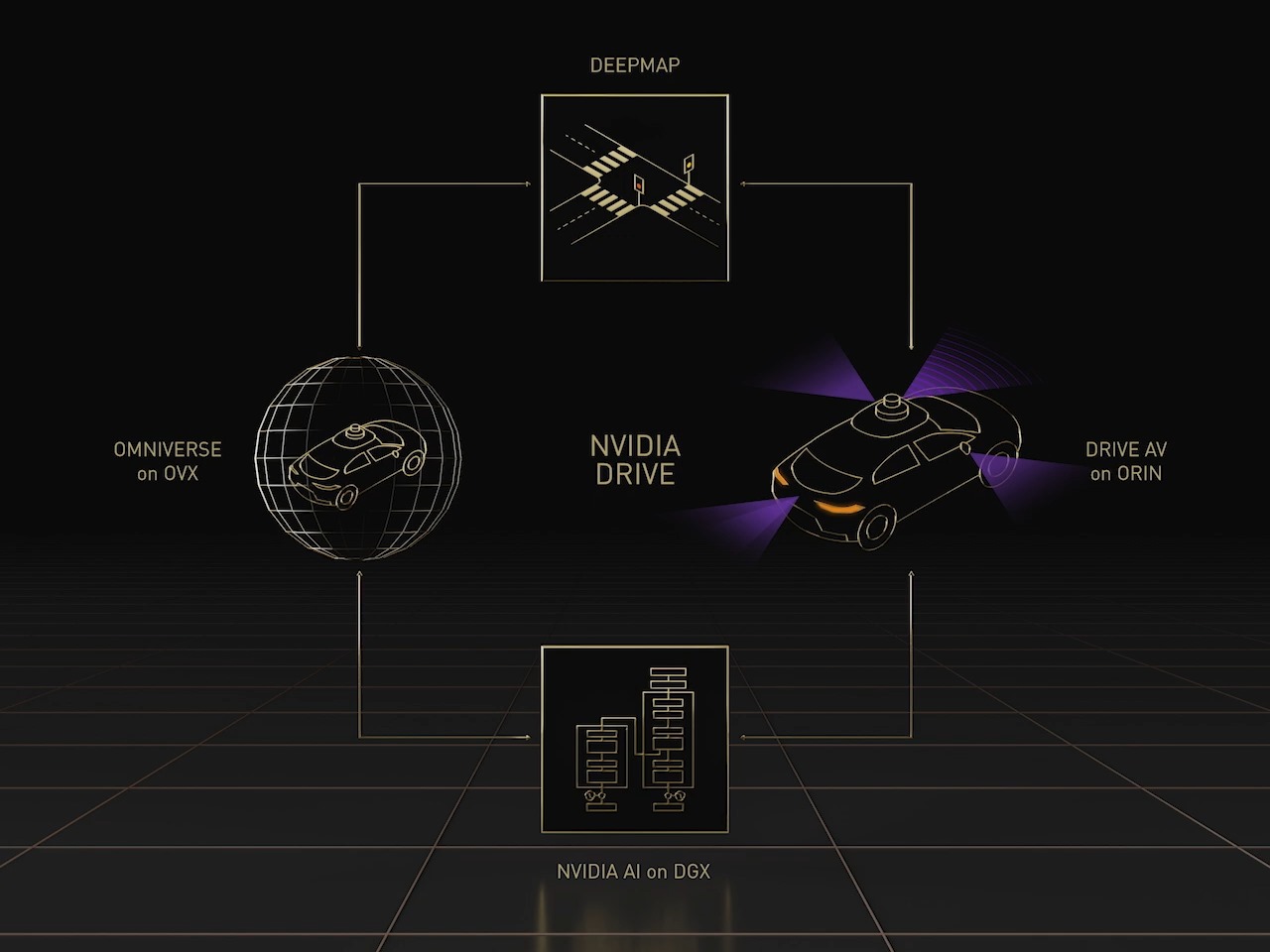 ▲ DRIVE Map除了可以协助行驶中的车辆,还能将数据导入Omniverse平台,用于制作数字孪生、搭配 NVIDIA DRIVE Sim自驾车模拟训练系统,用途弹性且多元。
▲ DRIVE Map除了可以协助行驶中的车辆,还能将数据导入Omniverse平台,用于制作数字孪生、搭配 NVIDIA DRIVE Sim自驾车模拟训练系统,用途弹性且多元。
NVIDIA表示预计DRIVE Map将在2024年完成包含北美、欧洲和亚洲等区域超过500,000公里的道路的地图,并透过数百万车辆持续更新数据,并开放DRIVE Map给整个自驾车产业使用。
 微信扫一扫
微信扫一扫